ddpm 例会总结
代码主要由几个部分组成,分别是文件加载器、ddpm主体、UNet神经网络及其训练和生成。
主体部分代码
import sys, os
sys.path.append(os.path.abspath(".."))
from ddpm.data import get_loader
from ddpm.core import MyDDPM
from ddpm.train import training_loop
from ddpm.sampling import generate_new_images
from ddpm.visualize import show_images
from ddpm.models.tinyUnet import TinyUNet
from torch.optim import Adam
import torch
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
loader = get_loader(fashion=False, batch_size=128)
model = TinyUNet().to(device)
ddpm = MyDDPM(model, device=device)
training_loop(ddpm, loader, n_epochs=20, optim=Adam(ddpm.parameters(), 0.001), device=device, store_path="saved_models/tinyUnet_mnist.pt")
generated = generate_new_images(ddpm, n_samples=64, device=device, gif_name="gifs/tinyUnet_mnist.gif")
show_images(generated, "Final Results")ddpm的正向过程
首先先理解ddpm在做什么。
我们的目标是要把一个纯噪声“复原”成我们需要的数据,比如手写数字。
一步到位生成一张图片显然是不现实的。所以ddpm采用了逆向思维,通过不断向样本添加噪声,一步步将数据样本变成纯噪声。这个过程是完全可控的,称之为正向过程。
设为数据样本,为随机噪声,那么过程可以描述为:
然后我们只需训练一个神经网络来预测正向过程每一步添加的噪声,就能通过将较不好的图片减去这个噪声来得到可能较好的图片,即从还原到。
从数学上,是这样定义正向过程的:
其中:
- 是预设的噪声调度表
两个参数物理意义分别是:
- : 控制第t步添加的噪声量(破坏强度)
- : 控制上一步信号的保留程度(保真强度)
它们的取值策略称为噪声调度,一般来说随t逐渐下降.本次例会的代码的噪声调度采用和线性变化的形式.
采样公式的推导
为了适合代码实现,我们需要进行一些数学推导.
其中正好是多个独立的正态噪声之和,其均值为0,方差则分别为、、、、。
然后,我们利用一个概率论的知识——正态分布的叠加性,即上述多个独立的正态噪声之和的分布,实际上是均值为0、方差为的正态分布。又由,可以得到
所以实际上化简后有
这个式子称为采样公式,可以通过直接从生成。所以实际代码中我们直接用一个tensor存储不同t的的连续乘积,这样就能减少一部分的计算量。
正向过程的代码实现
import torch
import torch.nn as nn
class MyDDPM(nn.Module):
def __init__(self, network, n_steps=1000, min_beta=1e-4, max_beta=0.02, device=None, image_chw=(1, 28, 28)):
super().__init__()
self.n_steps = n_steps
self.device = device
self.image_chw = image_chw
self.network = network.to(device)
# 主体神经网络(如UNet/MLP等),用于去噪预测
# 线性生成每一步的beta(噪声强度),用于前向扩散过程
# torch.linspace(start, end, steps) 会在 [start, end] 区间内,生成 steps 个等间隔的数。
# 返回的是一个 一维张量,形状为 (n_steps,)
self.betas = torch.linspace(min_beta, max_beta, n_steps).to(device)
self.alphas = 1 - self.betas # 每一步的alpha
# alpha_bar为累计连乘积,表示每一步的总保留比例
self.alpha_bars = torch.tensor([torch.prod(self.alphas[:i + 1]) for i in range(n_steps)]).to(device)
def forward(self, x0, t, eta=None):
n, c, h, w = x0.shape
a_bar = self.alpha_bars[t]
if eta is None:
eta = torch.randn(n, c, h, w).to(self.device)
# 按照扩散公式加噪声,生成第t步的noisy图像
noisy = a_bar.sqrt().reshape(n, 1, 1, 1) * x0 + (1 - a_bar).sqrt().reshape(n, 1, 1, 1) * eta
return noisy
def backward(self, x, t):
# 用网络预测去噪
return self.network(x, t)值得注意的是forward方法中是通过alpha_bar[t]获取的.所以shape为(n,),不能直接与shape为(n,c,h,w)的和相乘,需用reshape方法调整为(n,1,1,1)。
UNet模型
正向过程搞定了,那么要用神经网络来预测噪声了。这里采用的是简化的UNet模型。
UNet在基础的编码器-解码器结构上,添加了卷积、时间步嵌入和跳跃连接等特点.
代码主体架构如下:

时间步嵌入
首先,这个神经网络要做的是从到的工作,所以它是与不同t是相关的,也就是它要根据不同的t对图像进行不同力度的调整。
那么怎么做呢?如果时间步仅仅是个标量,模型难以察觉不同时间步之间的区别。
所以我们让每个时间步索引唯一地对应一个时间嵌入向量,这样模型就能较轻松学习到不同时间步的差别和调整大小了。这个步骤用专业名词来说就是时间步嵌入。
这里用的是一种叫做正弦位置编码的方式来生成时间嵌入向量。(稍微简化过的)
给定时间步索引 (标量)和嵌入维度 ,生成的时间嵌入向量 由以下公式定义:
其中是:
正弦位置编码的代码实现
import torch
def sinusoidal_embedding(n, d):
embedding = torch.zeros(n, d)
#torch.zeros(n, d)创建一个n行d列的全零矩阵
wk = torch.tensor([1 / 10_000 ** (2 * j / d) for j in range(d)]).reshape(1, d)
#wk是一个1行d列的张量,包含了每个维度的权重
#前面部分默认形状是(d,)的一维张量,所以用reshape(1, d)将其转换为1行d列的张量
t = torch.arange(n).reshape(n, 1)
#torch.arange(n)创建一个从0到n-1的张量,默认形状为(n,)
#reshape(n, 1)将其转换为n行1列的张量
#[:, ::2]是偶数索引位置
#[:, 1::2]是奇数索引位置
embedding[:, ::2] = torch.sin(t * wk[:, ::2])
embedding[:, 1::2] = torch.cos(t * wk[:, 1::2])0
return embedding时间嵌入和时间投影
在UNet代码中,将正弦位置编码得到tensor放入嵌入层time_embed中.就能通过time_embed[t]获取对应时间嵌入向量.
虽然初始的正弦嵌入(代码中的time_embed)已经包含时间信息,但它是固定的、线性变换的表示.
所以需再添加一层神经网络(代码中的time_proj)来让神经网络学习不同时间步之间的关系,增加非线性映射能力.这步叫做时间投影
在UNet类中如此实现:
self.time_embed = nn.Embedding(n_steps, time_emb_dim)
self.time_embed.weight.data = sinusoidal_embedding(n_steps, time_emb_dim)
self.time_embed.requires_grad_(False)
self.time_proj = nn.Sequential(
nn.Linear(time_emb_dim, 28 * 28),
nn.SiLU()
)在forward方法中通过self.time_proj(self.time_embed(t)).view(n, 1, 28, 28)获取时间嵌入向量即可(注意,time_proj输出shape为(n,28,28),所以需变化一下)
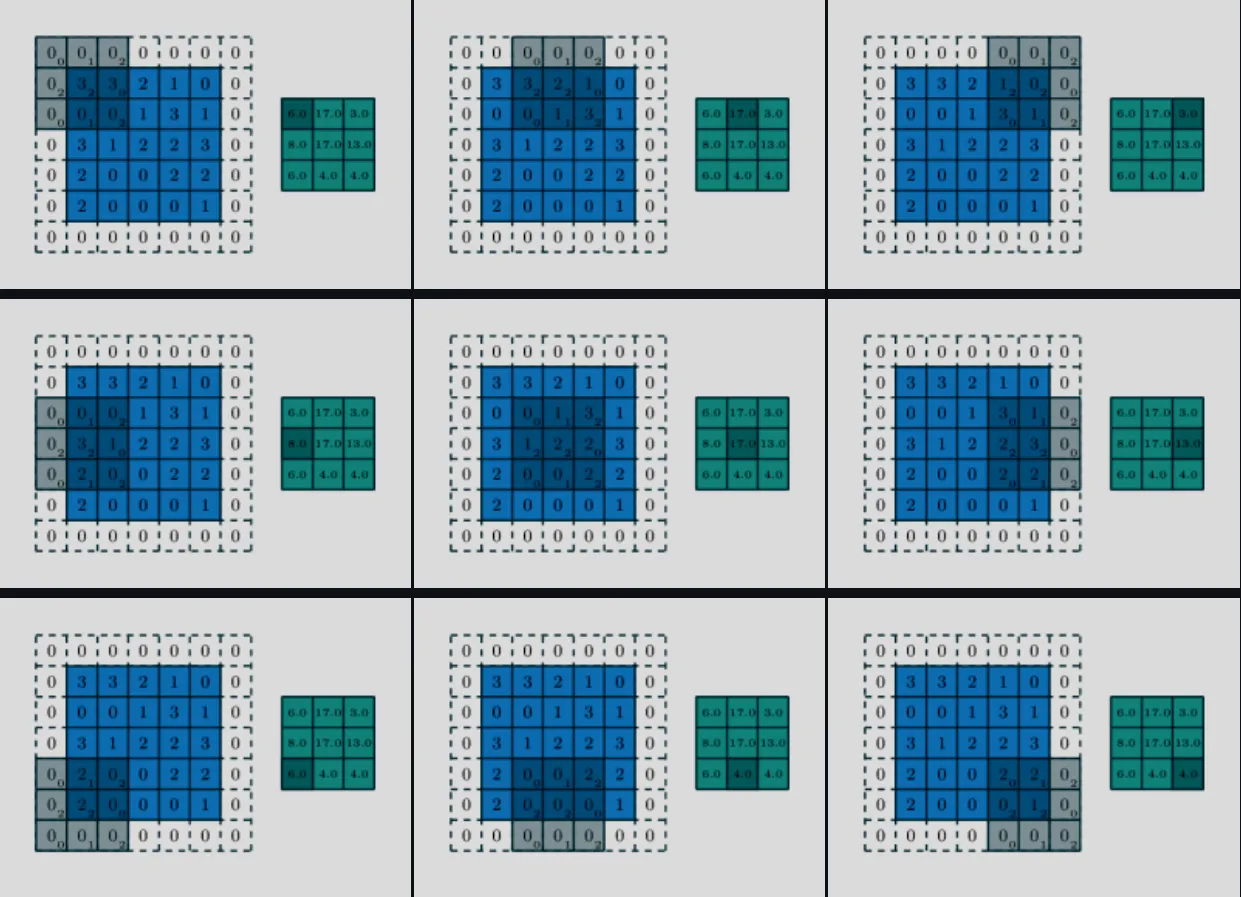
下采样
在将输入图像x与时间嵌入向量拼接后,就来到了编码器.
通过前面的流程图可以看到,图片的尺寸逐渐变小,而通道数逐渐增加.
这个信息逐渐压缩的过程称为下采样.
在这部分,重要的是提取出图像中的特征.所以自然就用到了卷积.
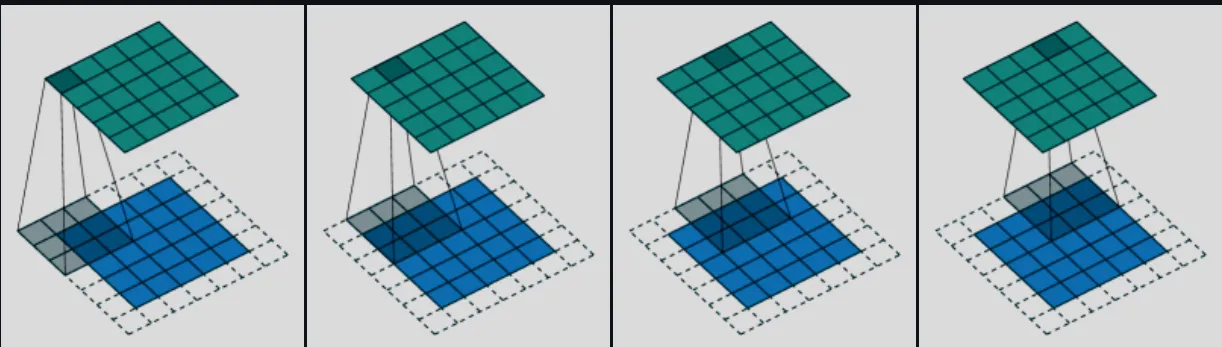
在图片逐渐压缩的每一步中,我们都用卷积来提取当前尺寸的特征(后面跳跃连接也会用到),然后再下采样到下一步.
这里下采样的代码通过将卷积的步长设置为2来实现分辨率减半.
效果如下图片(仅仅是展示步长为2的效果)
具体代码如下:
self.enc1 = nn.Sequential(
nn.Conv2d(2, 32, 3, padding=1),
nn.SiLU()
)
#下采样1
self.down1 = nn.Conv2d(32, 64, 4, stride=2, padding=1) # → (14x14)
self.enc2 = nn.Sequential(
nn.SiLU(),
nn.Conv2d(64, 64, 3, padding=1),
nn.SiLU()
)
#下采样2
self.down2 = nn.Conv2d(64, 128, 4, stride=2, padding=1) # → (7x7)上采样
与下采样相对应,解码器中有上采样.
上采样会增加图片的尺寸,同时减少通道数.这里使用转置卷积来实现.
效果大致如下:
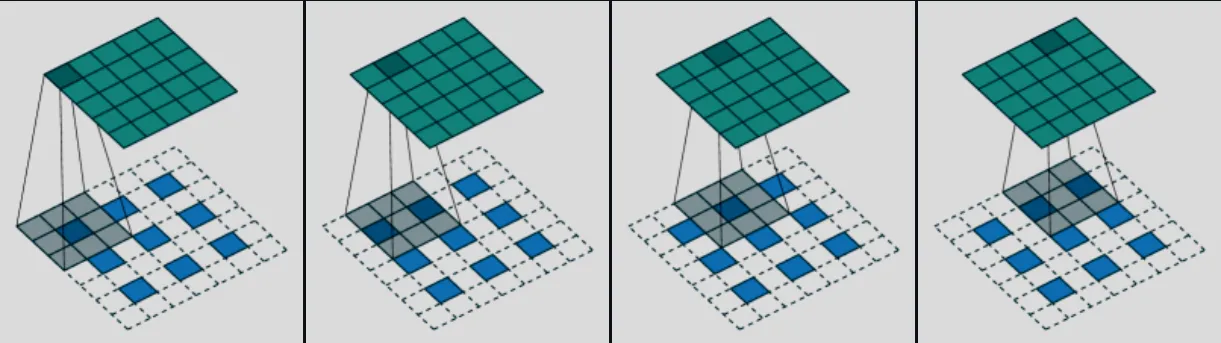
但是由于下采样会丢失空间细节.
所以UNet将编码器对应尺寸的原始细节信息直接跳跃连接至解码器对应部分,与解码器前面输出信息进行拼接.然后通过对应卷积层融合信息.
如在代码中dec1的输入是enc2和up1输出的拼接.dec2输入就是enc1和up2输出的拼接.
UNet类完整代码
import torch.nn as nn
import torch
from ddpm.utils import sinusoidal_embedding
class TinyUNet(nn.Module):
def __init__(self, n_steps: int = 1000, time_emb_dim: int = 100):
"""
简化版U-Net结构扩散模型
参数:
n_steps (int): 扩散步数,决定时间嵌入的范围。
time_emb_dim (int): 时间步嵌入的维度。
"""
super().__init__()
# 时间步嵌入,使用正弦位置编码初始化,不参与训练
self.time_embed = nn.Embedding(n_steps, time_emb_dim)
self.time_embed.weight.data = sinusoidal_embedding(n_steps, time_emb_dim)
self.time_embed.requires_grad_(False)
# 时间步嵌入投影为特征图,输出shape: (batch, 1, 28, 28)
self.time_proj = nn.Sequential(
nn.Linear(time_emb_dim, 28 * 28),
nn.SiLU()
)
# 编码器部分
self.enc1 = nn.Sequential(
nn.Conv2d(2, 32, 3, padding=1),
nn.SiLU()
)
self.down1 = nn.Conv2d(32, 64, 4, stride=2, padding=1) # → (14x14)
self.enc2 = nn.Sequential(
nn.SiLU(),
nn.Conv2d(64, 64, 3, padding=1),
nn.SiLU()
)
self.down2 = nn.Conv2d(64, 128, 4, stride=2, padding=1) # → (7x7)
# 瓶颈层
self.bottleneck = nn.Sequential(
nn.SiLU(),
nn.Conv2d(128, 128, 3, padding=1),
nn.SiLU()
)
# 解码器部分
self.up1 = nn.ConvTranspose2d(128, 64, 4, stride=2, padding=1) # → 14x14
self.dec1 = nn.Sequential(
nn.SiLU(),
nn.Conv2d(128, 64, 3, padding=1)
)
self.up2 = nn.ConvTranspose2d(64, 32, 4, stride=2, padding=1) # → 28x28
self.dec2 = nn.Sequential(
nn.SiLU(),
nn.Conv2d(64, 32, 3, padding=1)
)
self.out = nn.Conv2d(32, 1, 3, padding=1)
def forward(self, x: torch.Tensor, t: torch.Tensor) -> torch.Tensor:
"""
前向传播
参数:
x (torch.Tensor): 输入图像,shape (batch, 1, 28, 28)
t (torch.Tensor): 时间步索引,shape (batch,) 或 (batch, 1)
返回:
torch.Tensor: 输出去噪残差,shape (batch, 1, 28, 28)
"""
n = x.size(0)
t = t.view(-1) #统一时间步索引为(batch,)
# 获取时间步嵌入并投影为特征图
t_emb = self.time_proj(self.time_embed(t)).view(n, 1, 28, 28)
# 拼接原图和时间特征作为卷积输入
x = torch.cat([x, t_emb], dim=1) # (n,1,28,28) + (n,1,28,28) ⟶ (n, 2, 28, 28)
x1 = self.enc1(x) #(n,2,28,28) ⟶ (n,32,28,28)
x1_down = self.down1(x1) #(n,32,28,28) ⟶ (n,64,14,14)
x2 = self.enc2(x1_down) #(n,64,14,14) ⟶ (n,64,14,14)
x2_down = self.down2(x2) #(n,64,14,14) ⟶ (n,128,7,7)
x3 = self.bottleneck(x2_down)
u1 = self.up1(x3) #(n,128,7,7) ⟶ (n,64,14,14)
u1_cat = torch.cat([u1, x2], dim=1) #(n,64,14,14)+(n,64,14,14)⟶(n,128,14,14)
u1 = self.dec1(u1_cat) #(n,128,14,14)⟶ (n,64,14,14)
u2 = self.up2(u1) #(n,64,14,14) ⟶ (n,32,28,28)
u2_cat = torch.cat([u2, x1], dim=1)#(n,32,28,28)+(n,32,28,28)⟶(n,64,28,28)
u2 = self.dec2(u2_cat) #(n,64,28,28) ⟶ (n,32,28,28)
out = self.out(u2) #(n,32,28,28) ⟶ (n,1,28,28)
return out训练模型
接下来就是训练UNet的代码
损失采用了均方误差损失函数(MSE)。其数学公式为:
直接用pytorch的相关方法即可。
import torch
import torch.nn as nn
import os
from tqdm.auto import tqdm
from ddpm.visualize import show_images
from ddpm.sampling import generate_new_images
def training_loop(ddpm, loader, n_epochs, optim, device, display=False, store_path="ddpm_model.pt"):
# 定义均方误差损失函数
mse = nn.MSELoss()
best_loss = float("inf") # 记录最佳损失
n_steps = ddpm.n_steps # 扩散步数
# 确保保存模型的目录存在
os.makedirs(os.path.dirname(store_path), exist_ok=True)
for epoch in tqdm(range(n_epochs), desc="Training progress", colour="#00ff00"):
epoch_loss = 0.0
# 遍历数据集的每个batch
for step, batch in enumerate(tqdm(loader, leave=False, desc=f"Epoch {epoch + 1}/{n_epochs}", colour="#005500")):
x0 = batch[0].to(device) # 原始图片
n = len(x0)
# 随机生成噪声,形状与x0一致
eta = torch.randn_like(x0).to(device)
# 随机采样每张图片的扩散步数t
t = torch.randint(0, n_steps, (n,)).to(device)
# 正向扩散:将原图x0加噪声eta,得到第t步的noisy_imgs
noisy_imgs = ddpm(x0, t, eta)
# 反向过程:用模型预测噪声(去噪),输出eta_theta
eta_theta = ddpm.backward(noisy_imgs, t.reshape(n, -1))
# 损失函数:预测噪声与真实噪声的均方误差
loss = mse(eta_theta, eta)
optim.zero_grad() # 梯度清零
loss.backward() # 反向传播
optim.step() # 更新参数
# 累加本轮损失(按样本数加权平均)
epoch_loss += loss.item() * len(x0) / len(loader.dataset)
if display:
show_images(generate_new_images(ddpm, device=device), f"Images generated at epoch {epoch + 1}")
log_string = f"Loss at epoch {epoch + 1}: {epoch_loss:.3f}"
# 如果本轮损失更优,则保存模型
if best_loss > epoch_loss:
best_loss = epoch_loss
torch.save(ddpm.state_dict(), store_path)
log_string += " --> Best model ever (stored)"
print(log_string)生成图片
生成图片时我们只需将预测的噪声代入采样公式,稍做变形,就可以得到理论上被加噪声前的“好图片”了。
具体来说,将采样公式( )中替换为UNet生成的噪声,再将移至一边。得到反向扩散公式:
另外这里添加了生成gif来展示生成过程
import torch
import numpy as np
import einops
import imageio
@torch.no_grad()
def generate_new_images(ddpm, n_samples=16, device=None, frames_per_gif=100, gif_name="sampling.gif", c=1, h=28, w=28):
"""
采样生成新图像,并保存采样过程为GIF动图。
参数:
ddpm: 训练好的DDPM模型
n_samples: 生成样本数
device: 计算设备
frames_per_gif: GIF帧数
gif_name: GIF文件名
c, h, w: 图像通道数和尺寸
返回:
x: 最终生成的图像张量
"""
# 采样过程中要保存的帧索引
frame_idxs = np.linspace(0, ddpm.n_steps, frames_per_gif).astype(np.uint)
frames = []
if device is None:
device = ddpm.device
# 从高斯噪声开始采样
x = torch.randn(n_samples, c, h, w).to(device)
# 反向扩散过程,从纯噪声逐步去噪
for idx, t in enumerate(list(range(ddpm.n_steps))[::-1]):
# 构造当前步的时间张量
time_tensor = (torch.ones(n_samples, 1) * t).to(device).long()
# 用模型预测噪声
eta_theta = ddpm.backward(x, time_tensor)
# 获取当前步的alpha和alpha_bar
alpha_t = ddpm.alphas[t]
alpha_t_bar = ddpm.alpha_bars[t]
# 反向扩散公式,去噪一步
x = (1 / alpha_t.sqrt()) * (x - (1 - alpha_t) / (1 - alpha_t_bar).sqrt() * eta_theta)
# 除最后一步外,每步都加一点高斯噪声
if t > 0:
z = torch.randn(n_samples, c, h, w).to(device)
beta_t = ddpm.betas[t]
sigma_t = beta_t.sqrt()
x = x + sigma_t * z
# 保存采样过程中的部分帧用于生成GIF
if idx in frame_idxs or t == 0:
normalized = x.clone()
for i in range(len(normalized)):
normalized[i] -= torch.min(normalized[i])
normalized[i] *= 255 / torch.max(normalized[i])
# 将batch的图片拼成大图
frame = einops.rearrange(normalized, "(b1 b2) c h w -> (b1 h) (b2 w) c", b1=int(n_samples ** 0.5))
frame = frame.cpu().numpy().astype(np.uint8)
frames.append(frame)
# 保存GIF动图
with imageio.get_writer(gif_name, mode="I") as writer:
for idx, frame in enumerate(frames):
rgb_frame = np.repeat(frame, 3, axis=2)
writer.append_data(rgb_frame)
# 最后一帧多展示一会
if idx == len(frames) - 1:
for _ in range(frames_per_gif // 3):
writer.append_data(rgb_frame)
return x其他
还有文件加载和展示图片部分代码未展示,详见社团github代码仓库中.
里面还有用残差块等其他结构实现的ddpm可供参考。